Spatial and Temporal Changes of Tidal Inlet Using Object-Based Image Analysis of Multibeam Echosounder Measurements: A Case from the Lagoon of Venice, Italy

 , ,
, ,
Abstract
:
1. Introduction
2. Materials and Methods
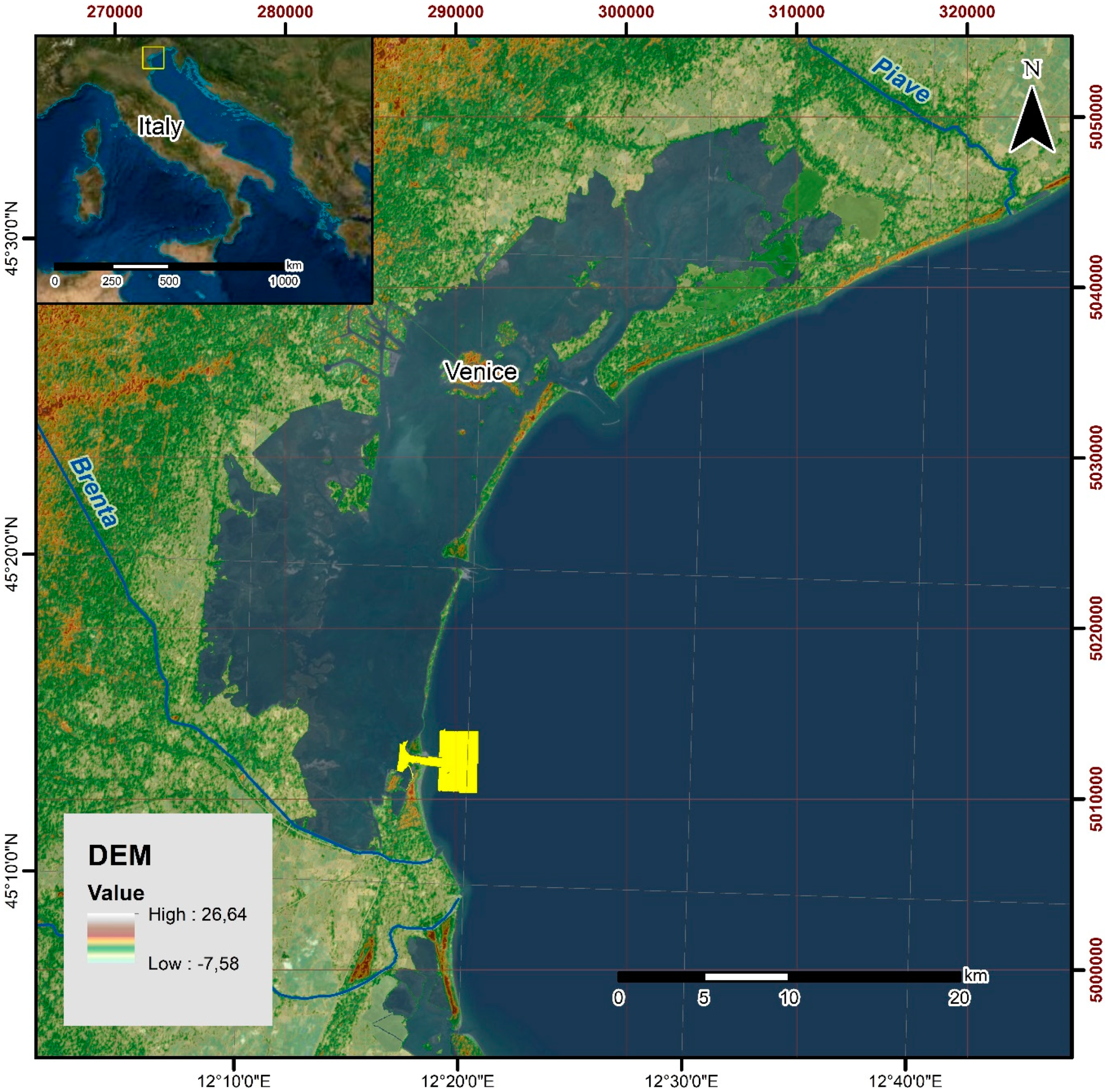
2.1. Study Area
2.2. MBES Data Acquisition
2.3. Ground Truth Samples
2.4. Processing of the MBES Dataset
2.5. Feature Extraction
2.6. Feature Selection
2.7. Object-Based Image Analysis: Image Segmentation and Supervised Classification
2.8. Evaluation of Performance
2.9. Change Detection
3. Results
3.1. Processing of MBES Datasets
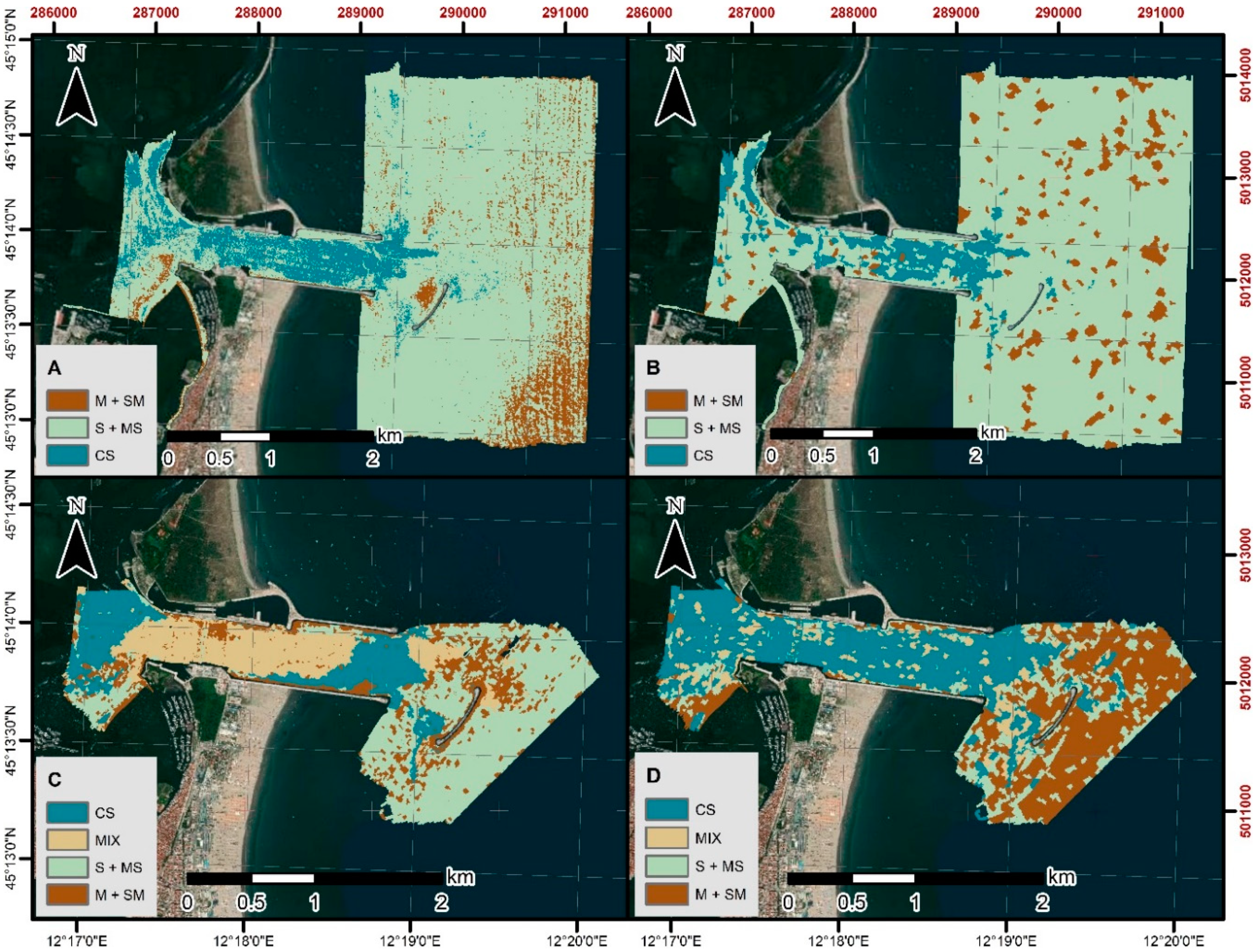
3.2. Identification of Benthic Habitat Classes
- M + SM: Medium-grained sediment, poorly sorted silt enriched with clay fractions accounting for 16–30% of the sediment, often covered with benthic vegetation. For the most part, these sediments occurred in the area sheltered by the coastal breakwater.
- CS: Very coarse-grained sand, characterized by poor sorting and enriched with coarser fractions of gravel, accounting for about 30%, and a very large amount of detritus, occurring mainly in the tidal channel.
- S + MS: Fine-grained sand with poor sorting. Silt and clay fractions accounted for about 12% and rarely contained benthic organisms. The sediments of this class were found mainly on the seaward side of the breakwater, in the channel and in the inlet, i.e., in the dune field and the large dune.
- MIX: Coarse-grained sand with very poor sorting, enriched with silt and clay fractions. The presence of detritus was negligible. Sediments were present mainly in the areas of vortices and jets (primary and secondary), generated in the inlet area and the breakwater.
3.3. Feature Extraction and Selection
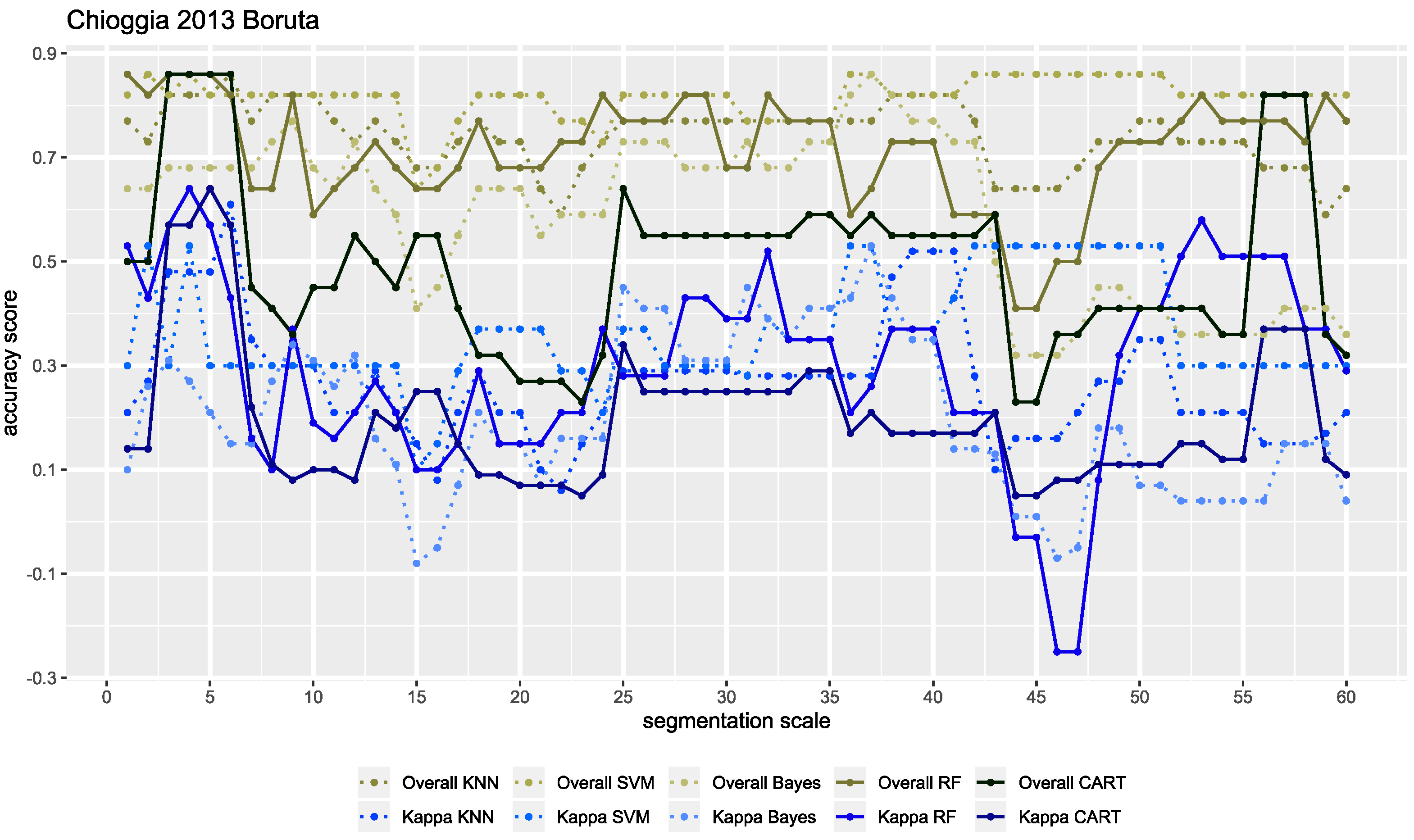
3.4. Image Segmentation, Classification, and Accuracy Assessment
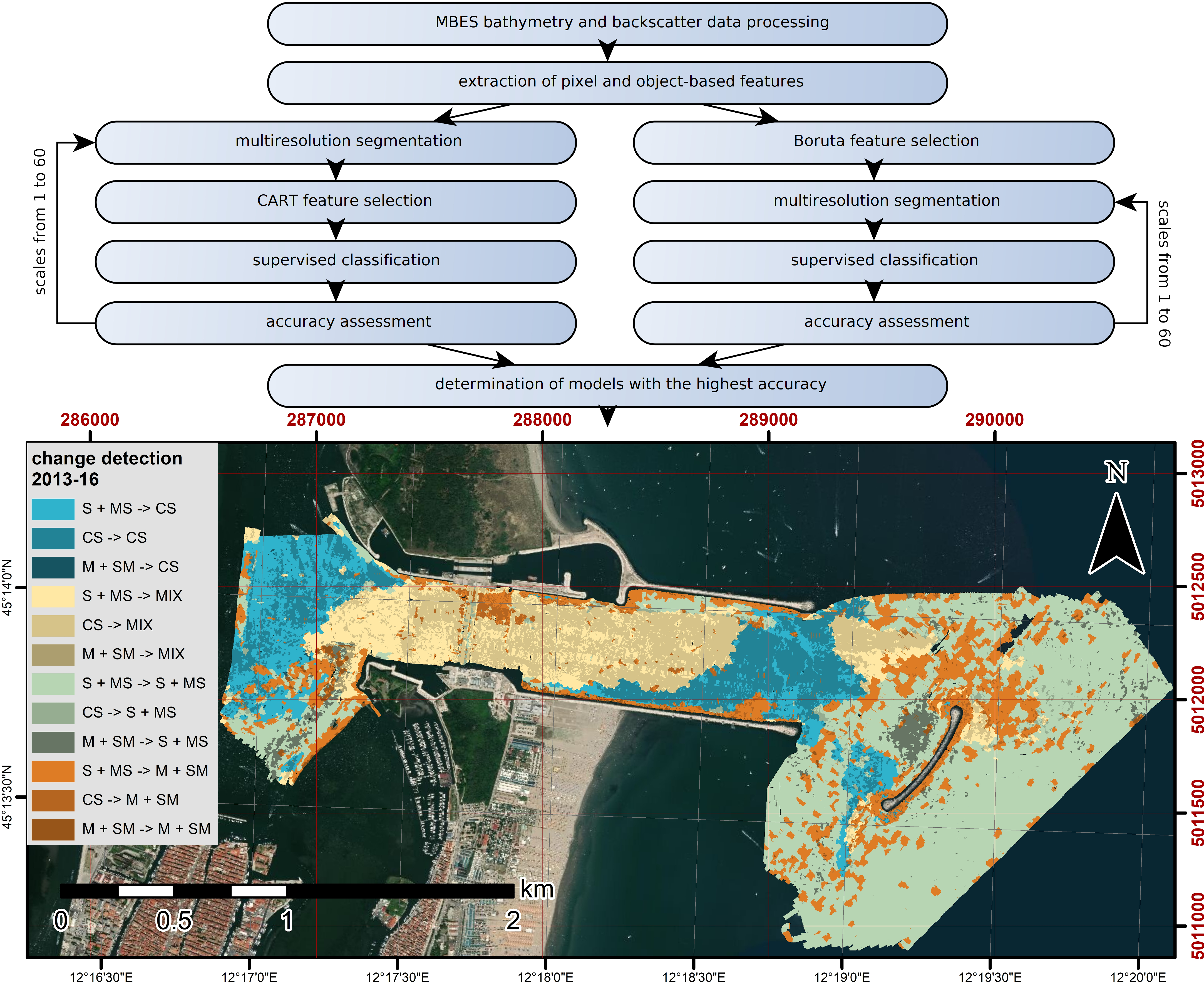
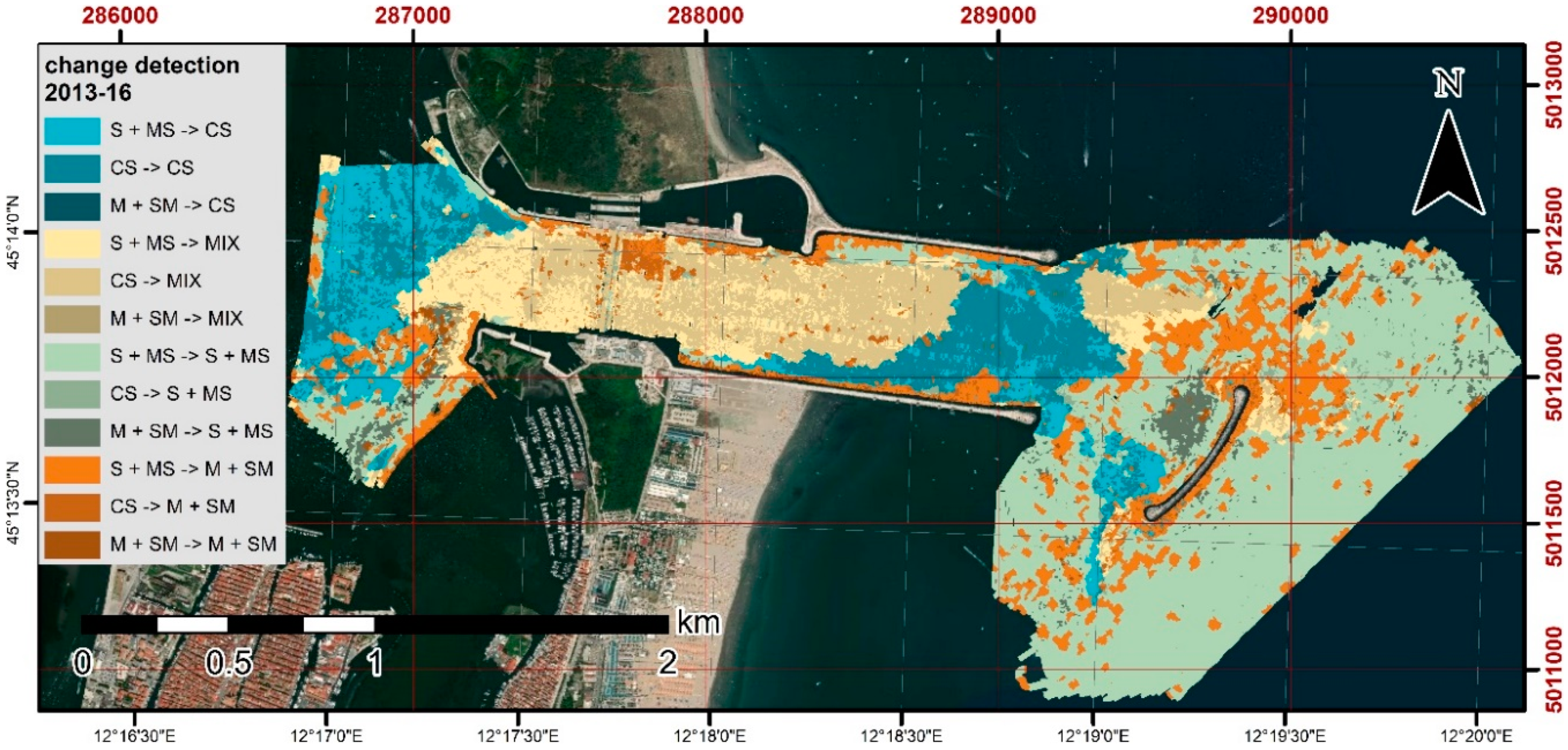
3.5. Change Detection
4. Discussion
4.1. Performance of Relevant Classifiers
4.2. Geological Interpretation of Results
4.3. Suggestions for Future Research
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A




References
- Harris, P.T.; Baker, E.K. Why Map Benthic Habitats? In Seafloor Geomorphology as Benthic Habitat; Harris, P.T., Baker, E.K., Eds.; Elsevier: London, UK, 2012; pp. 3–22. [Google Scholar]
- McGonigle, C.; Brown, C.; Quinn, R.; Grabowski, J. Evaluation of image-based multibeam sonar backscatter classification for benthic habitat discrimination and mapping at Stanton Banks, UK. Estuar. Coast. Shelf Sci. 2009, 81, 423–437. [Google Scholar] [CrossRef]
- Thorsnes, T.; Bjarnadóttir, L.R.; Jarna, A.; Baeten, N.; Scott, G.; Guinan, J.; Monteys, X.; Dove, D.; Green, S.; Gafeira, J.; et al. National Programmes: Geomorphological Mapping at Multiple Scales for Multiple Purposes. In Submarine Geomorphology; Micallef, A., Krastel, S., Savini, A., Eds.; Springer International Publishing: Cham, Germany, 2018; pp. 535–552. [Google Scholar] [CrossRef]
- Picard, K.; Whiteway, T.; Leplastrier, A.; Team, A. AusSeabed: Collaborating to Maximise Australian Seabed Mapping Efforts. In AGU Fall Meeting Abstracts; American Geophysical Union: Washington, DC, USA, 2018. [Google Scholar]
- Madricardo, F.; Foglini, F.; Kruss, A.; Ferrarin, C.; Pizzeghello, N.M.; Murri, C.; Rossi, M.; Bajo, M.; Bellafiore, D.; Campiani, E.; et al. High resolution multibeam and hydrodynamic datasets of tidal channels and inlets of the Venice Lagoon. Sci. Data 2017, 4, 170121. [Google Scholar] [CrossRef] [Green Version]
- Brown, C.J.; Smith, S.J.; Lawton, P.; Anderson, J.T. Benthic habitat mapping: A review of progress towards improved understanding of the spatial ecology of the seafloor using acoustic techniques. Estuar. Coast. Shelf Sci. 2011, 92, 502–520. [Google Scholar] [CrossRef]
- Lucieer, V.; Lucieer, A. Fuzzy clustering for seafloor classification. Mar. Geol. 2009, 264, 230–241. [Google Scholar] [CrossRef]
- Lucieer, V.; Hill, N.A.; Barrett, N.S.; Nichol, S. Do marine substrates ‘look’ and ‘sound’ the same? Supervised classification of multibeam acoustic data using autonomous underwater vehicle images. Estuar. Coast. Shelf Sci. 2013, 117, 94–106. [Google Scholar] [CrossRef]
- Lecours, V. On the Use of Maps and Models in Conservation and Resource Management (Warning: Results May Vary). Front. Mar. Sci. 2017, 4, 288. [Google Scholar] [CrossRef] [Green Version]
- Rattray, A.; Ierodiaconou, D.; Monk, J.; Versace, V.L.; Laurenson, L.J.B. Detecting patterns of change in benthic habitats by acoustic remote sensing. Mar. Ecol. Prog. Ser. 2013, 477, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Montereale-Gavazzi, G.; Roche, M.; Lurton, X.; Degrendele, K.; Terseleer, N.; Van Lancker, V. Seafloor change detection using multibeam echosounder backscatter: Case study on the Belgian part of the North Sea. Mar. Geophys. Res. 2018, 39, 229–247. [Google Scholar] [CrossRef]
- Fezzani, R.; Berger, L. Analysis of calibrated seafloor backscatter for habitat classification methodology and case study of 158 spots in the Bay of Biscay and Celtic Sea. Mar. Geophys. Res. 2018, 39, 169–181. [Google Scholar] [CrossRef] [Green Version]
- Gaida, T.C.; van Dijk, T.A.G.P.; Snellen, M.; Vermaas, T.; Mesdag, C.; Simons, D.G. Monitoring underwater nourishments using multibeam bathymetric and backscatter time series. Coast. Eng. 2020, 158, 103666. [Google Scholar] [CrossRef]
- Montereale-Gavazzi, G.; Roche, M.; Degrendele, K.; Lurton, X.; Terseleer, N.; Baeye, M.; Francken, F.; Van Lancker, V. Insights into the Short-Term Tidal Variability of Multibeam Backscatter from Field Experiments on Different Seafloor Types. Geosciences 2019, 9, 34. [Google Scholar] [CrossRef]
- Toso, C.; Madricardo, F.; Molinaroli, E.; Fogarin, S.; Kruss, A.; Petrizzo, A.; Pizzeghello, N.M.; Sinapi, L.; Trincardi, F. Tidal inlet seafloor changes induced by recently built hard structures. PLoS ONE 2019, 14, e0223240. [Google Scholar] [CrossRef] [PubMed]
- Hughes Clarke, J.E. Multibeam Echosounders. In Submarine Geomorphology; Micallef, A., Krastel, S., Savini, A., Eds.; Springer International Publishing: Cham, Germany, 2018; pp. 25–41. [Google Scholar] [CrossRef]
- Wendelboe, G. Backscattering from a sandy seabed measured by a calibrated multibeam echosounder in the 190–400 kHz frequency range. Mar. Geophys. Res. 2018, 39, 105–120. [Google Scholar] [CrossRef]
- Ierodiaconou, D.; Schimel, A.C.G.; Kennedy, D.; Monk, J.; Gaylard, G.; Young, M.; Diesing, M.; Rattray, A. Combining pixel and object based image analysis of ultra-high resolution multibeam bathymetry and backscatter for habitat mapping in shallow marine waters. Mar. Geophys. Res. 2018, 39, 271–288. [Google Scholar] [CrossRef]
- Lacharité, M.; Brown, C.J.; Gazzola, V. Multisource multibeam backscatter data: Developing a strategy for the production of benthic habitat maps using semi-automated seafloor classification methods. Mar. Geophys. Res. 2018, 39, 307–322. [Google Scholar] [CrossRef]
- Innangi, S.; Tonielli, R.; Romagnoli, C.; Budillon, F.; Di Martino, G.; Innangi, M.; Laterza, R.; Le Bas, T.; Lo Iacono, C. Seabed mapping in the Pelagie Islands marine protected area (Sicily Channel, southern Mediterranean) using Remote Sensing Object Based Image Analysis (RSOBIA). Mar. Geophys. Res. 2019, 40, 333–355. [Google Scholar] [CrossRef] [Green Version]
- Lucieer, V.; Lamarche, G. Unsupervised fuzzy classification and object-based image analysis of multibeam data to map deep water substrates, Cook Strait, New Zealand. Cont. Shelf Res. 2011, 31, 1236–1247. [Google Scholar] [CrossRef]
- Hasan, R.; Ierodiaconou, D.; Monk, J. Evaluation of Four Supervised Learning Methods for Benthic Habitat Mapping Using Backscatter from Multi-Beam Sonar. Remote Sens. 2012, 4, 3427–3443. [Google Scholar] [CrossRef] [Green Version]
- Stephens, D.; Diesing, M. A comparison of supervised classification methods for the prediction of substrate type using multibeam acoustic and legacy grain-size data. PLoS ONE 2014, 9, e93950. [Google Scholar] [CrossRef]
- Mitchell, P.J.; Downie, A.-L.; Diesing, M. How good is my map? A tool for semi-automated thematic mapping and spatially explicit confidence assessment. Environ. Model. Softw. 2018, 108, 111–122. [Google Scholar] [CrossRef]
- Misiuk, B.; Diesing, M.; Aitken, A.; Brown, C.J.; Edinger, E.N.; Bell, T. A Spatially Explicit Comparison of Quantitative and Categorical Modelling Approaches for Mapping Seabed Sediments Using Random Forest. Geosciences 2019, 9, 254. [Google Scholar] [CrossRef] [Green Version]
- Wynn, R.B.; Huvenne, V.A.I.; Le Bas, T.P.; Murton, B.J.; Connelly, D.P.; Bett, B.J.; Ruhl, H.A.; Morris, K.J.; Peakall, J.; Parsons, D.R.; et al. Autonomous Underwater Vehicles (AUVs): Their past, present and future contributions to the advancement of marine geoscience. Mar. Geol. 2014, 352, 451–468. [Google Scholar] [CrossRef] [Green Version]
- Jones, D.O.B.; Gates, A.R.; Huvenne, V.A.I.; Phillips, A.B.; Bett, B.J. Autonomous marine environmental monitoring: Application in decommissioned oil fields. Sci. Total Environ. 2019, 668, 835–853. [Google Scholar] [CrossRef]
- Umgiesser, G.; Canu, D.M.; Cucco, A.; Solidoro, C. A finite element model for the Venice Lagoon. Development, set up, calibration and validation. J. Mar. Syst. 2004, 51, 123–145. [Google Scholar] [CrossRef]
- Molinaroli, E.; Guerzoni, S.; Sarretta, A.; Masiol, M.; Pistolato, M. Thirty-year changes (1970 to 2000) in bathymetry and sediment texture recorded in the Lagoon of Venice sub-basins, Italy. Mar. Geol. 2009, 258, 115–125. [Google Scholar] [CrossRef] [Green Version]
- Albani, A.D.; Donnici, S.; Serandrei-Barbero, R.; Rickwood, P.C. Seabed sediments and foraminifera over the Lido Inlet: Comparison between 1983 and 2006 distribution patterns. Cont. Shelf Res. 2010, 30, 847–858. [Google Scholar] [CrossRef]
- Madricardo, F.; Foglini, F.; Campiani, E.; Grande, V.; Catenacci, E.; Petrizzo, A.; Kruss, A.; Toso, C.; Trincardi, F. Assessing the human footprint on the sea-floor of coastal systems: The case of the Venice Lagoon, Italy. Sci. Rep. 2019, 9, 6615. [Google Scholar] [CrossRef]
- Trincardi, F.; Barbanti, A.; Bastianini, M.; Benetazzo, A.; Cavaleri, L.; Chiggiato, J.; Papa, A.; Pomaro, A.; Sclavo, M.; Tosi, L.; et al. The 1966 Flooding of Venice: What Time Taught Us for the Future. Oceanography 2016, 29, 178–186. [Google Scholar] [CrossRef] [Green Version]
- The ISMAR Team: Cavaleri, L.; Bajo, M.; Barbariol, F.; Bastianini, M.; Benetazzo, A.; Bertotti, L.; Chiggiato, J.; Ferrarin, C.; Trincardi, F.; Umgiesser, G. The 2019 flooding of Venice and Its Implications for Future Predictions. Oceanography 2020, 33, 42–49. [Google Scholar] [CrossRef] [Green Version]
- Ghezzo, M.; Guerzoni, S.; Cucco, A.; Umgiesser, G. Changes in Venice Lagoon dynamics due to construction of mobile barriers. Coast. Eng. 2010, 57, 694–708. [Google Scholar] [CrossRef] [Green Version]
- Umgiesser, G.; Matticchio, B. Simulating the mobile barrier (MOSE) operation in the Venice Lagoon, Italy: Global sea level rise and its implication for navigation. Ocean Dyn. 2006, 56, 320–332. [Google Scholar] [CrossRef]
- Villatoro, M.M.; Amos, C.L.; Umgiesser, G.; Ferrarin, C.; Zaggia, L.; Thompson, C.E.L.; Are, D. Sand transport measurements in Chioggia inlet, Venice lagoon: Theory versus observations. Cont. Shelf Res. 2010, 30, 1000–1018. [Google Scholar] [CrossRef]
- Fogarin, S.; Madricardo, F.; Zaggia, L.; Sigovini, M.; Montereale-Gavazzi, G.; Kruss, A.; Lorenzetti, G.; Manfé, G.; Petrizzo, A.; Molinaroli, E.; et al. Tidal inlets in the Anthropocene: Geomorphology and benthic habitats of the Chioggia inlet, Venice Lagoon (Italy). Earth Surf. Process. Landf. 2019, 44, 2297–2315. [Google Scholar] [CrossRef]
- Donda, F.; Brancolini, G.; Tosi, L.; Kovačević, V.; Baradello, L.; Gačić, M.; Rizzetto, F. The ebb-tidal delta of the Venice Lagoon, Italy. Holocene 2008, 18, 267–278. [Google Scholar] [CrossRef]
- Zecchin, M.; Baradello, L.; Brancolini, G.; Donda, F.; Rizzetto, F.; Tosi, L. Sequence stratigraphy based on high-resolution seismic profiles in the late Pleistocene and Holocene deposits of the Venice area. Mar. Geol. 2008, 253, 185–198. [Google Scholar] [CrossRef]
- Wentworth, C.K. A Scale of Grade and Class Terms for Clastic Sediments. J. Geol. 1922, 30, 377–392. [Google Scholar] [CrossRef]
- Folk, R.L. The distinction between grain size and mineral composition in sedimentary rock nomenclature. J. Geol. 1954, 62, 344–359. [Google Scholar] [CrossRef]
- Folk, R.L. A Review of Grain-Size Parameters. Sedimentology 1966, 6, 73–93. [Google Scholar] [CrossRef]
- Folk, R.L.; Ward, W.C. Brazos River bar [Texas]; a study in the significance of grain size parameters. J. Sediment. Res. 1957, 27, 3–26. [Google Scholar] [CrossRef]
- Fonseca, L.; Calder, B. Geocoder: A Efficient Backscatter Map Constructor; Hydrographic Society of America: San Diego CA, USA, 2015. [Google Scholar]
- Beaudoin, J.; Hughes Clarke, J.E.; Van Den Ameele, E.J.; Gardner, J.V. Geometric and Radiometric Correction of Multibeam Backscatter Derived from Reson 8181 Systems. In Proceedings of the Canadian Hydrographic Conference (CHC), Toronto, ON, Canada, 28–31 May 2008. [Google Scholar]
- Fonseca, L.; Brown, C.; Calder, B.; Mayer, L.; Rzhanov, Y. Angular range analysis of acoustic themes from Stanton Banks Ireland: A link between visual interpretation and multibeam echosounder angular signatures. Appl. Acoust. 2009, 70, 1298–1304. [Google Scholar] [CrossRef]
- Walbridge, S.; Slocum, N.; Pobuda, M.; Wright, D. Unified Geomorphological Analysis Workflows with Benthic Terrain Modeler. Geosciences 2018, 8, 94. [Google Scholar] [CrossRef] [Green Version]
- Burrough, P.A.; McDonell, R.A. Principles of Geographical Information Systems; Oxford University Press: New York, NY, USA, 1998. [Google Scholar]
- Roberts, D.W. Ordination on the basis of fuzzy set theory. Vegetatio 1986, 66, 123–131. [Google Scholar] [CrossRef]
- Zevenbergen, L.W.; Thorne, C.R. Quantitative analysis of land surface topography. Earth Surf. Process. Landf. 1987, 12, 47–56. [Google Scholar] [CrossRef]
- Hobson, R.D. Surface roughness in topography: Quantitative approach. In Spatial Analysis in Geomorphology; Chorley, R.J., Ed.; Harper and Row: New York, NY, USA, 1972; pp. 221–245. [Google Scholar]
- Sappington, J.M.; Longshore, K.M.; Thompson, D.B. Quantifying Landscape Ruggedness for Animal Habitat Analysis: A Case Study Using Bighorn Sheep in the Mojave Desert. J. Wildl. Manag. 2007, 71, 1419–1426. [Google Scholar] [CrossRef]
- Wilson, M.F.J.; O’Connell, B.; Brown, C.; Guinan, J.C.; Grehan, A.J. Multiscale Terrain Analysis of Multibeam Bathymetry Data for Habitat Mapping on the Continental Slope. Mar. Geod. 2007, 30, 3–35. [Google Scholar] [CrossRef] [Green Version]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I.H. Textural Features for Image Classification. IEEE Trans. Syst. ManCybern. 1973, SMC-3, 610–621. [Google Scholar] [CrossRef] [Green Version]
- Hall-Beyer, M. GLCM Texture: A Tutorial. National Council on Geographic Information and Analysis Remote Sensing Core Curriculum. 2007. Available online: https://prism.ucalgary.ca/handle/1880/51900 (accessed on 30 June 2020).
- van der Sanden, J.J.; Hoekman, D.H. Review of relationships between grey-tone co-occurrence, semivariance, and autocorrelation based image texture analysis approaches. Can. J. Remote Sens. 2014, 31, 207–213. [Google Scholar] [CrossRef]
- Breiman, L.; Friedman, J.H.; Olshen, R.A.; Stone, C.J. Classification and Regression Trees; Wadsworth: Belmont, UK, 1984. [Google Scholar]
- Guyon, I.; Elisseeff, A. An introduction to Variable and Feature Selection. J. Mach. Learn. Res. 2003, 3, 1157–1182. [Google Scholar]
- Saeys, Y.; Inza, I.; Larranaga, P. A review of feature selection techniques in bioinformatics. Bioinformatics 2007, 23, 2507–2517. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kursa, M.B.; Rudnicki, W.R. Feature Selection with the Boruta Package. J. Stat. Softw. 2010, 36. [Google Scholar] [CrossRef] [Green Version]
- Kursa, M.B.; Rudnicki, W.R. Package ‘Boruta’. Wrapper Algorithm for All Relevant Feature Selection. 2016. Available online: https://m2.icm.edu.pl/boruta/ (accessed on 19 April 2017).
- Bivand, R.; Keitt, T.; Rowlingson, B.; Pebesma, E.; Sumner, M.; Hijmans, R.; Rouault, E. Package ‘rgdal’. Bindings for the Geospatial Data Abstraction Library. Available online: https://cran.r-project.org/web/packages/rgdal/index.html (accessed on 15 October 2017).
- Hay, G.J.; Castilla, G. Object-Based Image Analysis: Strengths, Weaknesses, Oppoortunities and Threats (SWOT). Salzburg. ISPRS Arch. 2006, XXXVI-4/C42. [Google Scholar]
- Benz, U.C.; Hofmann, P.; Willhauck, G.; Lingenfelder, I.; Heynen, M. Multi-resolution, object-oriented fuzzy analysis of remote sensing data for GIS-ready information. Isprs J. Photogramm. Remote Sens. 2004, 58, 239–258. [Google Scholar] [CrossRef]
- Baatz, M.; Schäpe, A. Multiresolution segmentation—An optimization approach for high quality multi-scale image segmentation. In Angewandte Geographische Informations—Verarbeitung XII; Stobl, J., Blashke, T., Griesebner, G., Eds.; Wichmann Verlag: Karlsruhe, Germany, 2000; pp. 12–23. [Google Scholar]
- Janowski, L.; Tegowski, J.; Nowak, J. Seafloor mapping based on multibeam echosounder bathymetry and backscatter data using Object-Based Image Analysis: A case study from the Rewal site, the Southern Baltic. Oceanol. Hydrobiol. Stud. 2018, 47, 248–259. [Google Scholar] [CrossRef]
- Diesing, M.; Thorsnes, T. Mapping of Cold-Water Coral Carbonate Mounds Based on Geomorphometric Features: An Object-Based Approach. Geosciences 2018, 8, 34. [Google Scholar] [CrossRef] [Green Version]
- Diesing, M.; Green, S.L.; Stephens, D.; Lark, R.M.; Stewart, H.A.; Dove, D. Mapping seabed sediments: Comparison of manual, geostatistical, object-based image analysis and machine learning approaches. Cont. Shelf Res. 2014, 84, 107–119. [Google Scholar] [CrossRef] [Green Version]
- Mehryar, M.; Rostamizadeh, A.; Talwalkar, A. Foundations of Machine Learning; The MIT Press: Cambridge, UK, 2012. [Google Scholar]
- Wolpert, D. The Lack of A Priori Distinctions between Learning Algorithms. Neural Comput. 1996, 8, 1341–1390. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Bremner, D.; Demaine, E.; Erickson, J.; Iacono, J.; Langerman, S.; Morin, P.; Toussaint, G. Output-Sensitive Algorithms for Computing Nearest-Neighbour Decision Boundaries. Discret. Comput. Geom. 2005, 33, 593–604. [Google Scholar] [CrossRef]
- Foody, G.M. Status of land cover classification accuracy assessment. Remote Sens. Environ. 2002, 80, 185–201. [Google Scholar] [CrossRef]
- Story, M.; Congalton, R.G. Accuracy assessment: A user’s perspective. Photogramm. Eng. Remote Sens. 1986, 52, 397–399. [Google Scholar]
- Congalton, R.G. A review of assessing the accuracy of classifications of remotely sensed data. Remote Sens. Environ. 1991, 37, 35–46. [Google Scholar] [CrossRef]
- Cohen, J. A Coefficient of Agreement for Nominal Scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Altman, D.G. Practical Statistics for Medical Research; Chapman & Hall: London, UK, 1991. [Google Scholar]
- Pontius, R.G.; Shusas, E.; McEachern, M. Detecting important categorical land changes while accounting for persistence. Agric. Ecosyst. Environ. 2004, 101, 251–268. [Google Scholar] [CrossRef]
- Long, D. BGS Detailed Explanation of Seabed Sediment Modified Folk Classification. 2006. Available online: http://www.emodnet-seabedhabitats.eu/PDF/GMHM3_Detailed_explanation_of_seabed_sediment_classification.pdf (accessed on 14 September 2017).
- Lyons, M.B.; Keith, D.A.; Phinn, S.R.; Mason, T.J.; Elith, J. A comparison of resampling methods for remote sensing classification and accuracy assessment. Remote Sens. Environ. 2018, 208, 145–153. [Google Scholar] [CrossRef]
- Fogarin, S. Mappatura dell’ambiente sedimentario della bocca tidale di Chioggia (Laguna di Venezia): Backscatter acustico, morfologia del fondale e distribuzione dimensionale. Bachelor’s Thesis, Università Ca’ Foscari, Venice, Italy, 2015. [Google Scholar]
- Misiuk, B.; Lecours, V.; Bell, T. A multiscale approach to mapping seabed sediments. PLoS ONE 2018, 13, e0193647. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rooper, C.N.; Zimmermann, M. A bottom-up methodology for integrating underwater video and acoustic mapping for seafloor substrate classification. Cont. Shelf Res. 2007, 27, 947–957. [Google Scholar] [CrossRef]
- Hasan, R.; Ierodiaconou, D.; Laurenson, L. Combining angular response classification and backscatter imagery segmentation for benthic biological habitat mapping. Estuar. Coast. Shelf Sci. 2012, 97, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Ierodiaconou, D.; Monk, J.; Rattray, A.; Laurenson, L.; Versace, V.L. Comparison of automated classification techniques for predicting benthic biological communities using hydroacoustics and video observations. Cont. Shelf Res. 2011, 31, S28–S38. [Google Scholar] [CrossRef]
- Rattray, A.; Ierodiaconou, D.; Laurenson, L.; Burq, S.; Reston, M. Hydro-acoustic remote sensing of benthic biological communities on the shallow South East Australian continental shelf. Estuar. Coast. Shelf Sci. 2009, 84, 237–245. [Google Scholar] [CrossRef]
- Li, J.; Tran, M.; Siwabessy, J. Selecting Optimal Random Forest Predictive Models: A Case Study on Predicting the Spatial Distribution of Seabed Hardness. PLoS ONE 2016, 11, e0149089. [Google Scholar] [CrossRef] [PubMed]
- Simons, D.G.; Snellen, M. A Bayesian approach to seafloor classification using multi-beam echo-sounder backscatter data. Appl. Acoust. 2009, 70, 1258–1268. [Google Scholar] [CrossRef]
- Blaschke, T.; Hay, G.J.; Kelly, M.; Lang, S.; Hofmann, P.; Addink, E.; Queiroz Feitosa, R.; van der Meer, F.; van der Werff, H.; van Coillie, F.; et al. Geographic Object-Based Image Analysis—Towards a new paradigm. Isprs J. Photogramm. Remote Sens. 2014, 87, 180–191. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Samsudin, S.A.; Hasan, R.C. Assessment of Multibeam Backscatter Texture Analysis for Seafloor Sediment Classification. Isprs. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-4/W5, 177–183. [Google Scholar] [CrossRef] [Green Version]
- Janowski, L.; Trzcinska, K.; Tegowski, J.; Kruss, A.; Rucinska-Zjadacz, M.; Pocwiardowski, P. Nearshore Benthic Habitat Mapping Based on Multi-Frequency, Multibeam Echosounder Data Using a Combined Object-Based Approach: A Case Study from the Rowy Site in the Southern Baltic Sea. Remote Sens. 2018, 10, 1983. [Google Scholar] [CrossRef] [Green Version]
- Diesing, M.; Stephens, D. A multi-model ensemble approach to seabed mapping. J. Sea Res. 2015, 100, 62–69. [Google Scholar] [CrossRef]
- Hasan, R.; Ierodiaconou, D.; Laurenson, L.; Schimel, A. Integrating multibeam backscatter angular response, mosaic and bathymetry data for benthic habitat mapping. PLoS ONE 2014, 9, e97339. [Google Scholar] [CrossRef] [Green Version]
- Rattray, A.; Ierodiaconou, D.; Womersley, T. Wave exposure as a predictor of benthic habitat distribution on high energy temperate reefs. Front. Mar. Sci. 2015, 2, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Brown, C.J.; Sameoto, J.A.; Smith, S.J. Multiple methods, maps, and management applications: Purpose made seafloor maps in support of ocean management. J. Sea Res. 2012, 72, 1–13. [Google Scholar] [CrossRef]
- Plets, R.; Clements, A.; Quinn, R.; Strong, J.; Breen, J.; Edwards, H. Marine substratum map of the Causeway Coast, Northern Ireland. J. Maps 2012, 8, 1–13. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Bathymetry Feature | ID | Backscatter Intensity Feature |
|---|---|---|---|
| 1 | Rugosity | 17 | Backscatter standard deviation |
| 2 | Slope | 18 | GLCM mean |
| 3 | Variance | 19 | GLCM standard deviation |
| 4 | Aspect | 20 | GLCM entropy |
| 5 | Eastness | 21 | GLCM homogeneity |
| 6 | Northness | 22 | GLCM contrast |
| 7 | Curvature | 23 | GLCM correlation |
| 8 | Planar curvature | 24 | GLCM angular second moment |
| 9 | Profile curvature | 25 | GLCM dissimilarity |
| 10 | Small-scale BPI | ||
| 11 | Large-scale BPI | ||
| 12 | Bathymetry standard deviation | ||
| 13 | Rugosity standard deviation | ||
| 14 | Slope standard deviation | ||
| 15 | Small-scale BPI standard deviation | ||
| 16 | Large-scale BPI standard deviation |
| MBES Backscatter Image | Class ID | Texture Description | Seabed Image | Seabed Composition | ||
|---|---|---|---|---|---|---|
| 2013 | 2016 | 2013 | 2016 | |||
 |  | M + SM | Very low backscatter intensity, gradually changed to other textures |  |  | Mud and sandy mud, often covered by benthic vegetation, like Nassarius nitidus, Carcinus astuarii, Spatangidea sp., Veneridae sp. |
 |  | CS | High and very high backscatter intensity |  |  | Coarse sediment covered by dense benthic detritus and communities of Chamalea, Venerupis aurea, Ostereidae sp., Serpulidae sp., Pectinidae sp. |
 |  | S + MS | Low backscatter intensity covering large patches |  |  | Medium-grained and muddy sand, rare presence of benthic organisms |
| - |  | MIX | Speckled pattern of low and high backscatter intensity | - |  | Coarse sediment with sand and mud, rarely covered by benthic detritus |
| A | Reference | B | Reference | ||||||||||
| M + SM | S + MS | CS | Sum | M + SM | S + MS | CS | Sum | ||||||
| Prediction | M + SM | 1 | 1 | 0 | 2 | Prediction | M + SM | 1 | 1 | 0 | 2 | ||
| S + MS | 1 | 16 | 0 | 17 | S + MS | 2 | 16 | 0 | 18 | ||||
| CS | 1 | 0 | 2 | 3 | CS | 0 | 0 | 2 | 2 | ||||
| Sum | 3 | 17 | 2 | 22 | Sum | 3 | 17 | 2 | 22 | ||||
| Producer’s | 0.33 | 0.94 | 1.00 | Producer’s | 0.33 | 0.94 | 1.00 | ||||||
| User’s | 0.50 | 0.94 | 0.67 | User’s | 0.50 | 0.89 | 1.00 | ||||||
| Overall accuracy | 0.86 | Overall accuracy | 0.86 | ||||||||||
| Kappa | 0.64 | Kappa | 0.61 | ||||||||||
| C | Reference | D | Reference | ||||||||||
| CS | MIX | M + SM | S + MS | Sum | CS | MIX | M + SM | S + MS | Sum | ||||
| Prediction | CS | 6 | 1 | 1 | 0 | 8 | Prediction | CS | 5 | 1 | 0 | 1 | 7 |
| MIX | 0 | 2 | 0 | 1 | 3 | MIX | 1 | 2 | 1 | 0 | 4 | ||
| M + SM | 0 | 0 | 1 | 0 | 1 | M + SM | 0 | 0 | 2 | 0 | 2 | ||
| S + MS | 0 | 0 | 1 | 2 | 3 | S + MS | 0 | 0 | 0 | 2 | 2 | ||
| Sum | 6 | 3 | 3 | 3 | 15 | Sum | 6 | 3 | 3 | 3 | 15 | ||
| Producer’s | 1.00 | 0.67 | 0.33 | 0.67 | Producer’s | 0.83 | 0.67 | 0.67 | 0.67 | ||||
| User’s | 0.75 | 0.67 | 1.00 | 0.67 | User’s | 0.71 | 0.50 | 1.00 | 1.00 | ||||
| Overall accuracy | 0.73 | Overall accuracy | 0.73 | ||||||||||
| Kappa | 0.62 | Kappa | 0.62 | ||||||||||
| Habitat Class | 2016 | |||||
|---|---|---|---|---|---|---|
| CS | MIX | M + SM | S + MS | Total 2013 | ||
| 2013 | CS | 10.07 | 12.15 | 1.74 | 1.00 | 24.97 |
| M + SM | 0.08 | 0.30 | 0.91 | 2.50 | 3.78 | |
| S + MS | 9.28 | 8.42 | 14.08 | 39.46 | 71.25 | |
| Total 2016 | 19.44 | 20.87 | 16.72 | 42.97 | 100.00 | |
| Class | Total 2013 | Total 2016 | Gain | Loss | Total Change | Swap (Location) | Net (Quantity) | G/p | L/p | N/p |
|---|---|---|---|---|---|---|---|---|---|---|
| CS | 24.97 | 19.44 | 9.37 | 14.90 | 24.26 | 18.73 | 5.53 | 0.93 | 1.48 | −0.55 |
| MX | - | 20.87 | 20.87 | 0 | 20.87 | 0.00 | 20.87 | - | - | - |
| M_SM | 3.78 | 16.72 | 15.81 | 2.88 | 18.69 | 5.76 | 12.94 | 17.47 | 3.18 | 14.29 |
| S_MS | 71.25 | 42.97 | 3.51 | 31.78 | 35.29 | 7.01 | −28.28 | 0.09 | 0.81 | −0.72 |
| Total | 100.00 | 100.00 | 49.56 | 49.56 | 99.12 | 31.50 | 67.61 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Janowski, L.; Madricardo, F.; Fogarin, S.; Kruss, A.; Molinaroli, E.; Kubowicz-Grajewska, A.; Tegowski, J. Spatial and Temporal Changes of Tidal Inlet Using Object-Based Image Analysis of Multibeam Echosounder Measurements: A Case from the Lagoon of Venice, Italy. Remote Sens. 2020, 12, 2117. https://doi.org/10.3390/rs12132117
Janowski L, Madricardo F, Fogarin S, Kruss A, Molinaroli E, Kubowicz-Grajewska A, Tegowski J. Spatial and Temporal Changes of Tidal Inlet Using Object-Based Image Analysis of Multibeam Echosounder Measurements: A Case from the Lagoon of Venice, Italy. Remote Sensing. 2020; 12(13):2117. https://doi.org/10.3390/rs12132117
Chicago/Turabian StyleJanowski, Lukasz, Fantina Madricardo, Stefano Fogarin, Aleksandra Kruss, Emanuela Molinaroli, Agnieszka Kubowicz-Grajewska, and Jaroslaw Tegowski. 2020. "Spatial and Temporal Changes of Tidal Inlet Using Object-Based Image Analysis of Multibeam Echosounder Measurements: A Case from the Lagoon of Venice, Italy" Remote Sensing 12, no. 13: 2117. https://doi.org/10.3390/rs12132117